Toggle navigation
首页
问答
文章
积分商城
专家
专区
更多专区...
文档中心
返回主站
搜索
提问
会员
中心
登录
注册
github_CI_action
github
【GITHUB】【ACTION】如何给软件包添加CI集成
1.00
发布于 2022-09-20 22:27:36 浏览:1239
订阅该版
[tocm] # 【github】【action】如何给软件包添加CI集成 ## 简介 `github`有自己的CI集成工具 `action`, 很少有小伙伴关注到,如果你有自己的软件包,想要对其进行维护的话,添加CI集成能够方便你快速验证你的代码是否在RTT上可以顺利编译。 下面的链接是`github action`的帮助文档: https://docs.github.com/cn/actions 本文会大概指导一下大家,如何在自己软件包上添加CI集成工具,由于每个软件包的配置都不相同,要根据下面的步骤,灵活的配置你自己的软件包。 添加CI 大概有以下作用: - 可以验证你的软件包在不同的bsp下面的编译情况,可以告诉用户bsp是可以用你的软件包的。 - 在RTTHREAD升级的时候,可以通过触发CI来告诉作者,该软件包编译是否有问题。 - 可以学习如何自行部署action和调试action。 - 也可以间接的告诉作者如何使用你的软件包 ## 背景 在我们PR的时候,经常会遇到CI不通过的情况,其实是RT-THREAD仓库里面的action 下面链接的文件起作用 https://github.com/RT-Thread/rt-thread/blob/master/.github/workflows/action.yml 受这个启发,我们把它整合到我们自己的软件包仓库下面。下面以我的仓库的软件包举例 https://github.com/supperthomas/RTTHREAD_SEGGER_TOOL 欢迎star ## 步骤 ### 第一步 下载软件包 先把你的软件包下载下来 ``` git clone git@github.com:supperthomas/RTTHREAD_SEGGER_TOOL.git ``` 然后` git branch ` 看下当前的分支是`main` 还是`master` 这个后面需要用到,我这里是`main` 然后新建一个分支,自己起任意名字,因为我们要发起PR到自己仓库,所以不能像以前一样直接PR到main分支 ``` git checkout -b ci_test ``` ### 第二步 添加action.yml 这里给大家提供一个模板,可以先尝试添加如下的模板在仓库的`.github` 文件夹下面新建一个`workflows`文件夹,下面添加`action.yml`。 ``` name: SEGGER_RTT # Controls when the action will run. Triggers the workflow on push or pull request # events but only for the master branch on: # Runs at 16:00 UTC (BeiJing 00:00) on the 1st of every month schedule: - cron: '0 16 1 * *' push: branches: - main paths-ignore: - documentation/** - '**/README.md' - '**/README_zh.md' pull_request: branches: - main paths-ignore: - documentation/** - '**/README.md' - '**/README_zh.md' jobs: build: runs-on: ubuntu-latest name: ${{ matrix.legs.RTT_BSP }} strategy: fail-fast: false matrix: legs: - {RTT_BSP: "qemu-vexpress-a9", RTT_TOOL_CHAIN: "sourcery-arm"} steps: - uses: actions/checkout@v3 with: repository: RT-Thread/rt-thread - name: Set up Python uses: actions/setup-python@v3 with: python-version: 3.8 - name: Install Tools shell: bash run: | sudo apt-get update sudo apt-get -qq install gcc-multilib libncurses5-dev scons sudo python -m pip install --upgrade pip -qq pip install requests -qq git config --global http.postBuffer 524288000 python -c "import tools.menuconfig; tools.menuconfig.touch_env()" echo "RTT_ROOT=${{ github.workspace }}" >> $GITHUB_ENV echo "RTT_CC=gcc" >> $GITHUB_ENV - name: Install Arm ToolChains if: ${{ matrix.legs.RTT_TOOL_CHAIN == 'sourcery-arm' && success() }} shell: bash run: | wget -q https://github.com/RT-Thread/toolchains-ci/releases/download/v1.3/gcc-arm-none-eabi-10-2020-q4-major-x86_64-linux.tar.bz2 sudo tar xjf gcc-arm-none-eabi-10-2020-q4-major-x86_64-linux.tar.bz2 -C /opt /opt/gcc-arm-none-eabi-10-2020-q4-major/bin/arm-none-eabi-gcc --version echo "RTT_EXEC_PATH=/opt/gcc-arm-none-eabi-10-2020-q4-major/bin" >> $GITHUB_ENV - name: Bsp Scons Compile if: ${{ success() }} shell: bash env: RTT_BSP: ${{ matrix.legs.RTT_BSP }} RTT_TOOL_CHAIN: ${{ matrix.legs.RTT_TOOL_CHAIN }} run: | source ~/.env/env.sh sed -i "s/# CONFIG_PKG_USING_SEGGER_RTT is not set/CONFIG_PKG_USING_SEGGER_RTT=y/g" bsp/$RTT_BSP/.config scons --pyconfig-silent -C bsp/$RTT_BSP cat bsp/$RTT_BSP/.config pushd bsp/$RTT_BSP && pkgs --update && popd scons -C bsp/$RTT_BSP ``` 这个模板只保留了qemu,第一次先测一下qemu,后面再添加其他的action,可以直接参考rt-thread里面的放置。 新建完了之后需要根据你自己的软件包做如下修改: #### 修改一:branch要对应main或者master 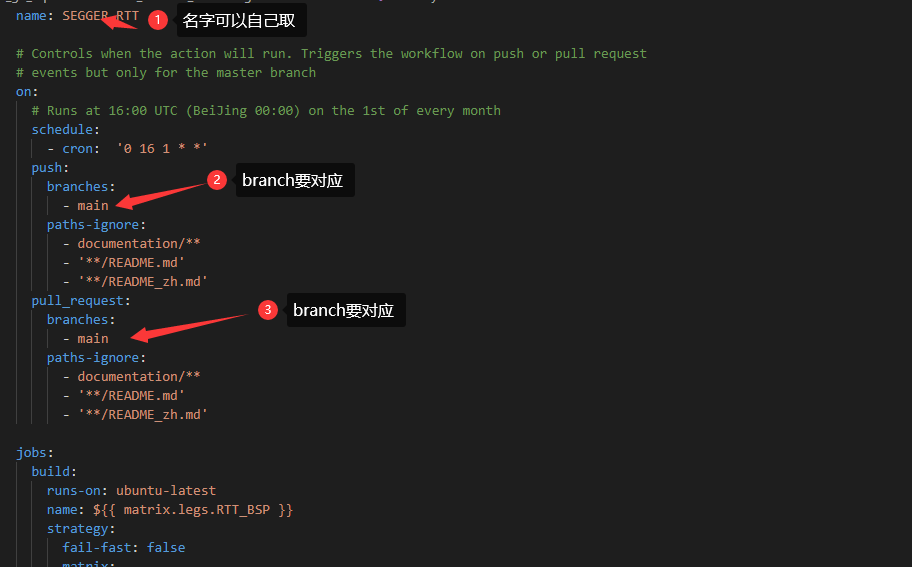 #### 修改二: .config要做对应修改 `.config`需要做对应的修改,首先要知道你的软件包要打开哪些配置,首先整个软件包有个大的宏,例如我的软件包就是`CONFIG_PKG_USING_SEGGER_RTT` 打开`.config`可以找到这个宏 用`sed`命令替换.config中的配置 从`# CONFIG_PKG_USING_SEGGER_RTT is not set` 替换为`CONFIG_PKG_USING_SEGGER_RTT=y` ``` sed -i "s/# CONFIG_PKG_USING_SEGGER_RTT is not set/CONFIG_PKG_USING_SEGGER_RTT=y/g" bsp/$RTT_BSP/.config ``` 这个你可以通过`menuconfig`配置之后,查看`git diff` 查看。 这个修改之后就可以使能软件包了 后面那句话 ``` scons --pyconfig-silent -C bsp/$RTT_BSP ``` 相当于执行了menuconfig。  如果要修改其他配置的话,请在`scons --pyconfig-silent -C bsp/$RTT_BSP` 这个语句后面执行,因为有些配置只有在使能软件包之后才会有.config 最后一定要记得执行`scons --pyconfig-silent -C bsp/$RTT_BSP` 相当于保存配置。 到这里`action.yml` 已经修改好了, ### 第三步 PR测试 接下来就要提交你的PR了 ``` git add . -u git commit -m "add ci" git push origin ci_test ``` 提交分支之后,点击PR按钮 执行PR,就可以看到对应的CI 开始跑了。 这个时候如果出现问题,需要点击下图中的`raw log` 查看  这里我通过命令`cat bsp/$RTT_BSP/.config` 将对应的`.config` 打印出来 你只要检查下.config内容和你用menuconfig内容有什么差异即可。 ### 第四步 添加其他bsp qemu添加ok之后,你就可以根据rt-thread中的action https://github.com/RT-Thread/rt-thread/blob/master/.github/workflows/action.yml 中的bsp列表,添加所有的bsp了。 可能会遇到的问题,需要挑选对应的bsp: - 可能有些`bsp` 的芯片`ROM`太小了, 你的软件包编译之后 代码越界了。 - 可能有些bsp的架构不适合你的软件包,比如我的SEGGER_RTT 就是只需要适配ARM相关的bsp即可。 欢迎大家提建议或者尝试在自己的软件包中添加CI集成。 参考软件包: https://github.com/RT-Thread-packages/nimble/actions/runs/3091247322
3
条评论
默认排序
按发布时间排序
登录
注册新账号
关于作者
RTT_逍遥
https://github.com/supperthomas
文章
40
回答
538
被采纳
82
关注TA
发私信
相关文章
1
RT_Thread ENV 下载问题
2
github下载时总是中断失败
3
提高github的响应速度
4
RT-thread ENV 工具配置软件包时总是无法连上git网址,无法下载?
5
软件包下载问题解决经验
6
无法下载littlevgl 软件包
7
软件包无法下载(已解决)
8
RT-Thread studio 如何更换git下载源?
9
【github】大家在用github有哪些问题
10
github登录不了,重置密码也不行
推荐文章
1
RT-Thread应用项目汇总
2
玩转RT-Thread系列教程
3
国产MCU移植系列教程汇总,欢迎查看!
4
机器人操作系统 (ROS2) 和 RT-Thread 通信
5
五分钟玩转RT-Thread新社区
6
【技术三千问】之《玩转ART-Pi》,看这篇就够了!干货汇总
7
关于STM32H7开发板上使用SDIO接口驱动SD卡挂载文件系统的问题总结
8
STM32的“GPU”——DMA2D实例详解
9
RT-Thread隐藏的宝藏之completion
10
【ART-PI】RT-Thread 开启RTC 与 Alarm组件
热门标签
RT-Thread Studio
串口
Env
LWIP
SPI
AT
Bootloader
Hardfault
CAN总线
FinSH
ART-Pi
DMA
USB
文件系统
RT-Thread
SCons
RT-Thread Nano
线程
MQTT
STM32
FAL
RTC
rt-smart
I2C_IIC
cubemx
UART
ESP8266
WIZnet_W5500
BSP
ota在线升级
PWM
flash
packages_软件包
freemodbus
潘多拉开发板_Pandora
ADC
GD32
定时器
编译报错
flashDB
keil_MDK
socket
中断
rt_mq_消息队列_msg_queue
Debug
ulog
SFUD
msh
C++_cpp
at_device
本月问答贡献
出出啊
1524
个答案
343
次被采纳
小小李sunny
1444
个答案
290
次被采纳
张世争
818
个答案
179
次被采纳
crystal266
555
个答案
162
次被采纳
whj467467222
1222
个答案
149
次被采纳
本月文章贡献
出出啊
1
篇文章
1
次点赞
小小李sunny
1
篇文章
1
次点赞
张世争
1
篇文章
2
次点赞
crystal266
2
篇文章
1
次点赞
whj467467222
2
篇文章
1
次点赞
回到
顶部
发布
问题
投诉
建议
回到
底部
 1.00
1.00  xiaorui
打赏了 1.00 元
2022-09-20 22:59:24
xiaorui
打赏了 1.00 元
2022-09-20 22:59:24




 xiaorui
打赏了 1.00 元
2022-09-20 22:59:24
xiaorui
打赏了 1.00 元
2022-09-20 22:59:24




